Manual de instrucciones para montar y configurar el XuGong V2 Pro

PUNTOS A DESTACAR + SETUP
- Calidad del carbono y del corte del mismo. Las piezas encajan unas con otras como un guante, es el primer frame de carbono que encaja a la PERFECCIÓN, basta con poner una pieza sobre la otra y ya automáticamente queda encajado.
- Sistema de anclaje de la estructura. Los Tornillos rojos son una pasada, además de la estética que aportan, las tuercas traen unos embellecedores plásticos que sirven a su vez para esconder la rosca del tornillo y para poder atornillar el tornillo dentro de la rosca autoblocante
- Gimbal calibrado y configurado en fábrica, un único cable para hacerlo funcionar. Funciona de miedo!
- SETUP
MANOS A LA OBRA

CONSTRUCCIÓN DE LA ESTRUCTURA
El primer paso es empezar a construir la estructura de carbono. La estructura se compone de:
- Placa 1x superior e 1x inferior
- 2x Separadores laterales largos, dan la altura al quad y aguantan las baterías
- 2x Separadores pequeños, sirven para colocar piezas como el Vtx.
- 1x Separador central, sirve para separar la zona de la batería con la zona de la Controladora
- 1x placa frontal, es donde irá enganchado nuestro gimbal ImmersionRC
- Tornillos, roscas autoblocantes y embellecedores.

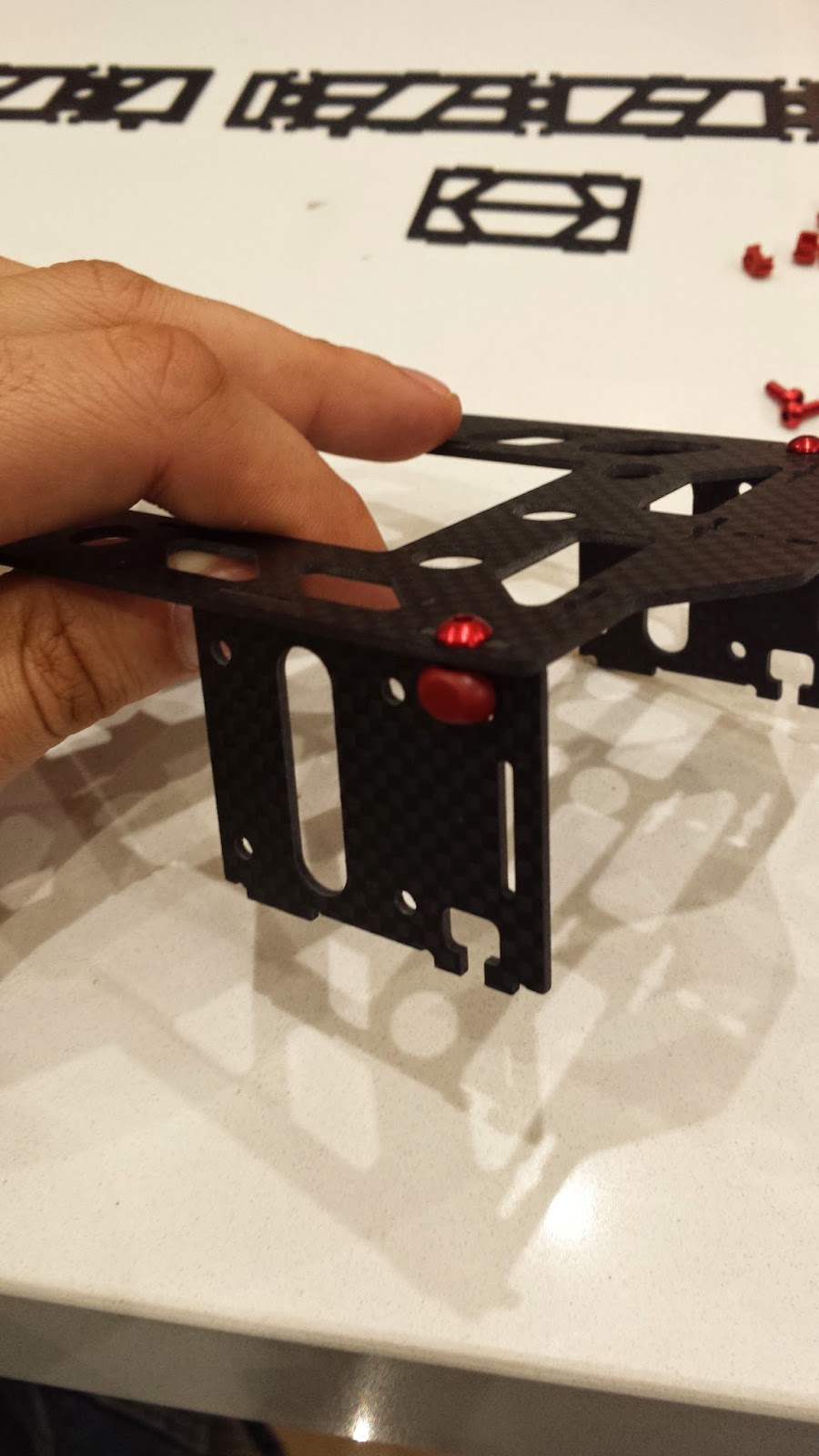
Introducimos la rosca autoblocante dentro del embellecedor de plástico. Solo hay una forma de colocarlo con lo cual no hay peligro con las equivocaciones.

A continuación colocamos una de las piezas de carbono sobre la ranura correcta, no tiene mucho misterio, la encontraréis enseguida. En la tercera foto se aprecia como una muesca es lisa y la otra muesca tiene dos protuberancias, esto nos ayudará a colocar correctamente la pieza ya que deberemos alinearla con la otra pieza, la que tiene las dos protuberancias encaja con la que tiene una linea con un pequeño agujero central.


Repetimos esa misma operación con los demás separadores y obtendremos un resultado como este.


Aquí ya podéis ver la parte superior montada, y la inferior con las gomas del tren de aterrizaje colocadas, la Naza m-lite y la batería, la cual queda perfectamente encajada, pudiendo, sin embargo, colocar baterías más grandes.


ENSAMBLAJE DE MOTORES Y ESC


Los motores solo tienen un problema, que el anillo que incorporan es demasiado grande para el agujero de los brazos con lo cual no vemos obligado a hacer el agujero central más grande o cortar parte del anillo. Yo he hecho ambas cosas.



A la hora de ubicar los motores debemos hacerlo de la siguiente manera:
- Motores con un punto blanco los colocaremos en M2 y M4
- Motores con un punto negro los colocaremos en M1 y M3

De todos modos no preocuparse, no es para nada complicado y además, ImmersionRC ya está preparando un set de estos motores con los anillos adecuados y los cables de la dimensión correcta. Hablando de cables, el XuGong viene con unas extensiones para los motores. Trenzándolos nos quedarán de la medida adecuada. Siempre tienen que tener un poco de holgura para poder retraer el brazo. A la hora de poner los Esc en los brazos hay que ponerlo en la parte de abajo para poder retraer el brazo correctamente. Otra cosa a tener en cuenta es la sujeción del ESC al brazo, lo ideal es utilizar una cinta adhesiva de doble cara o cualquier otra cosa que nos permita sujetar el ESC a la vez que no nos limite para plegar el brazo.

Aquí podemos ver los ESC acoplados a los brazos por la parte inferior con un brida muy fina. La conexión a la PDB viene bien determinada en la propia placa. Un consejo es soldar primero los ESC y colocar posteriormente los silentblocks.

PLACA DE DISTRIBUCIÓN
Una de las características más importantes de este quad. Esta PDB no evita tener que hacer conexiones, soldaduras y cableados. El pack nos incluye los cables ya hechos y lo único que tenemos que hacer es conectar la PDB con los diferentes elementos mediante el cable adecuado. Además de esto, la PDB tiene integrado el EzOSD con las últimas actualizaciones. Como novedad nos hace una estimación de minutos de vuelo restantes. A esto hay que añadir las funciones a las cuales ya nos tenían acostumbrados con el EzOSD, tales como altura, velocidad, distancia recorrida, flecha de vuelta a casa, RSSI, calidad de paquetes etc.

Como novedad, ahora la señal de vídeo la sacamos por el conector trasero del transmisor de vídeo 5.8Ghz 600mW de ImmersionRC, el conector I2C ubicado al lado del pad para cambiar los canales. Otra novedad es que el EzOSD aprovecha el GPS de la Naza, con lo cual nos evitamos tener dos GPS y a su vez podemos saber los satélites que ha cogido el GPS a través del propio OSD, con lo cual no es preciso estar pendiente del LED.


Es aconsejable conectar todos los cables y posteriormente colocar los silentblocks, de ese modo nos será mucho más fácil el trabajo.

Uno de los puntos fuertes de este frame. En el paquete nos vienen un sin fin de cables, plásticos y demás accesorios, los cuales no son necesarios para utilizar con el XuGong, sin embargo nos vienen incluidos por si el día de mañana lo queremos utilizar con otro frame

A efectos prácticos, lo único que tenemos que utilizar para hacerlo funcionar con el XuGong V2 Pro es lo siguiente. A la hora de conectar la gopro, yo he quitado la batería interna debido a que el propio cable alimenta la gopro, así me ahorro algunos gramos.


EZOSD
Simplemente fantástico, por un lado tenemos el RTH de la naza y por el otro todos los datos de telemetría necesarios en pantalla. Esto se traduce en una cosa, TRANQUILIDAD. El RTH se encarga de devolvernos el quad sano y salvo a casa en el caso de que algo no marche bien, problemas con el vídeo o la radio. Mientras vamos volando tenemos muchos datos en la mano, tales como autonomía de vuelo en minutos, mah consumidos, amperios disponibles, velocidad, altura, distancia, flecha de vuelta a casa, cantidad y calidad de la señal de radio. Todos estos datos nos aportan una seguridad increible a la hora de volar.


Y por si fuera poco, a través del Itelemetry podemos tener localizado nuestro quad en cualquier tablet o smartphone con el mapa google earth, además de otras funciones que nos ayudarán a localizar el quad en caso de que todo lo demás falle.


REVIEW
VUELOS
CONFIGURACIÓN NAZA Y TARANIS
TRANSPORTE
Hola,
ResponderEliminarLo primero agradecerte el tuto y decirte que tu blog ha sido el empujón definitivo para decidirme a pedir y montar el quad. Creo que hemos intercambiado algún mensaje en multicopters y creo también que hemos tenido algún malentendido por el camino. Espero que haber podido aclararlo, con mis disculpas.
El caso es que estoy con el montaje a medias y con un problema que no consigo resolver. He puesto un post en el hilo de multicopters, pero no he tenido respuesta y me gustaría tener alguna via de solución para esta noche, ya que tengo muy poca disponibilidad de horas y si no esta noche, igual me quedo estacando 2 semanas mas.
El problema es que he soldado los ESC a la placa sin calibrarlos y según he leido, quizas no debería haberlo hecho. Quisiera saber si lo de la calibracion de los ESC (he comprado los mismos que tu) es imprescindible, si la única manera de hacerlo es uno a uno con conexión directa al canal 3 del RX, si se puede hacer estando estos conectados a la placa o si hay algun procedimiento especial para una cofiguración PPM como la que tenemos en el Xugong.
Un saludo, y gracias de nuevo.
Hola,
ResponderEliminarMuchas gracias por este gran aporte, me ha servido de mucho ya que soy muy novato y estoy armando mi primer drone el cual es el mismo Xugong v2 pro, pero tengo una duda, yo no tengo una Naza, Tengo otra controladora de vuelo, el EzOSD solo se aprovecha si la controladora de vuelo es Naza?
Estoy contento :)
EliminarPues no te sabría decir, más que de la controladora dependerá del módulo gps que lleve esa controladora que utilizas, habría que ver si es compatible tanto por el protocolo de comunicación como por los pines. Seguramente pueda hacerse compatible si buscas que pines corresponden a que funciones.
Un ejemplo, se que hay mucha gente que está volando con una controladora APM pixhawk y no tienen ningún problema!!
Un saludo :)
Hola, tus imágenes me han ayudado a armar el mio, pero estoy atascado con algo, yo no tengo EzUHF rx, en ves de eso tengo un FRSKY D8R II Plus, igual lo pongo en el mismo sitio como si fuera el EzUHF rx?
ResponderEliminarHola Juanes. Para poder controlar el Xugong hace falta cualquier receptor que soporte señal PPM. Asegúrate de que el D8R II Plus admite PPM y como activarlo.
EliminarMuy buenas, yo tengo una emisora at9 de radiolink, tambien compré el módulo osd, prm02. Se conecta al receptor para saber datos tales como posicion, voltaje etc pero la otra parte deberia ir conectada a la placa? Muchas gracias
ResponderEliminarYo estoy armando el mio solo que sinppm , funciona con la comfiguracion estandar lo malo es que no puedo utilizar las funciones como el cambio de camara, de la placa solo uso el osd, en lo que consigo un receptor ppm.
ResponderEliminarHOLA
ResponderEliminarCUANTO VIENE COSTANDO TODO EL KIT CON SUS COMPONENTES ELECTRONICOS Y DE MAS ?
MUCHAS GRACIAS .